
RVの腕部、胴体の機構及び内部構造についての考察 【連載】電撃ロボラボ PLUS Vol.2

80年代はSFロボット黄金の時代。そんな時代に生まれた数々のリアルロボットたち。電撃ホビーマガジンとサンライズがタッグを組み、大人の感性と現代科学に即したSF考証でリアルロボットを検証し立体化していく……。それが「電撃ロボラボ」です。
※これまでのバックナンバーも併せてご覧ください。
【連載】電撃ロボラボ PLUS Vol.1 RVの腕部(おもにヒジ関節など)についての考察

前回はヒジの曲がり方への疑問に始まり、その理由付けと腕の機構検討の話し合いという流れで進められましたが、今回はNAOKI氏によるバイファム腕部の立体機構試作が用意され、それを実際に手に取りながら、腕の構造を検証していきます。(「電撃ホビーマガジン」2013年1月号掲載)




「ヒジの軸を2重にすることで、”捻り”を入れられるように、前腕への取り付け位置を深くしつつ、クリアランスを取ってフリーな部分ができることで、あの曲げを再現できます」 前号掲載のスケッチを基に機構試作を作ったNAOKI氏。実際に動く立体物に一同感心。前回、議論された関節可動についてはほぼパーフェクトに再現されているどころか、さらにプラスされた動きの要素に新たな想像が膨らんでいきました。

▲実際に関節の動く立体機構試作を手にすることで、様々なアイデアが膨らんでいくことに。
「ヒジ関節が角度を固定したままで平行移動できる……例えばザブングルみたいに武器を前腕に固定するロボいるでしょ、ああいう感じだとこの関節の動きっていりますよね。バズーカみたいな長い武器を取り回す際もそう」
「宇宙機なら、モーメントを打ち消すためですよね。腕全体を動かすと他の部分、身体の動きそのものが変わるから、身体は固定した状態で腕を動かしたい」
「慣性を最小限に抑えるためには有効な動きだし、武器を持って動かす際のふれも軽減できる」
「それに腕軸に干渉しない形でオフセット気味に長物を持てる機構って考えると、スゴく説得力が出てくる気が。その多重関節機構が作業用としての柔軟性も与えたと。」

▲ヒジ関節は曲げる側への動きを意識した位置にオフセットする形で軸が設けてあるので(そのため逆側にはほぼ動かない)、この向きの場合は外側に大きく反らせることが可能。
人の関節構造とは異なる軸の動き、機械としての脇に反るようなユニークな方向への可動は、必要ないものとも捉えるのではなく、RVが戦闘以外に補修作業や荷役などの船外活動用途にも使われるのであれば、あって然るべきでは……機構試作を手にNAOKI氏、井上氏、両氏が進めていく話が、腕部イメージのアウトラインを構築していきます。

▲1/100バイファムのストレートに近い作例もディテール等の参考用に用意。
話はヒジから肩の構造に。肩内側のブロックから、姿勢制御バーニア、肩アーマー部の内部構造などについて議論されていきました。
「内側のブロックに関しては、内部フレームをカバーする程度の存在として捉えるか、それとも、それなりに剛性を持った部分とするか?」
「フジツボ(バーニア)の深さというのも、気になる部分だとは。これが肩のインナーブロック部までつながる機構なのか、それとも肩アーマーへの埋め込みだけで完結する仕組みなのか?」
色々と論議が飛び交う中、インナーブロック部まで繋がっている案は肩関節軸の存在を考えると現実味がないという話に落ち着き、肩アーマーのお椀状の部分に肩バーニアの機構は集約されているのでは……という話に。

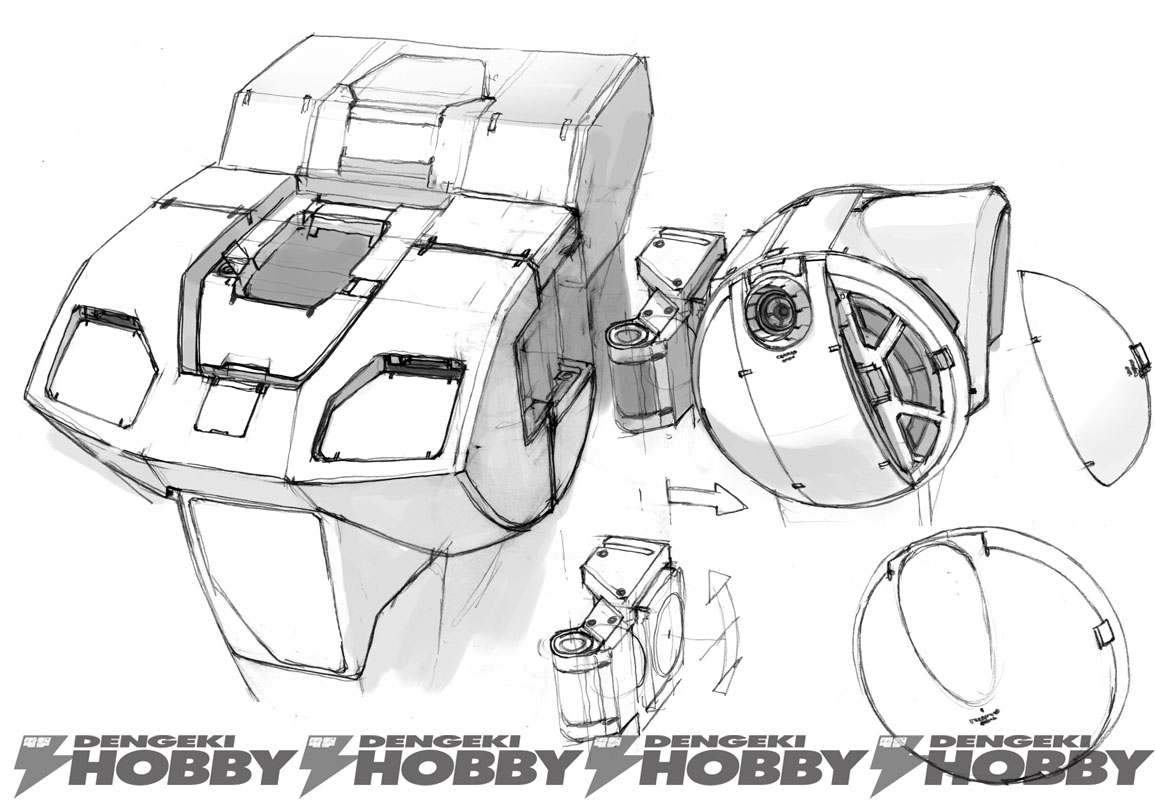
▲ミーティング中には、このようにスケッチを交えて様々な構造の議論が行われます。これは肩バーニア構造検討時の様子。センターにバーニアユニット、囲むように推進剤タンクのイメージが描かれています。
「お椀部分は独立したパーツなんだけど、回転にも使われる接続軸はインナーブロック部まで繋がっている仕組みかと。バーニア付近は基部のユニットを内包していて、その側面を推進剤タンクが囲むというレイアウトが理想的な形ではないかと」
「センター部分に燃焼室等のユニットが固まっていて、左右を推進剤カートリッジという仕組みにするのが面白いかも。交換も容易になりますし」
「小型の推進剤ペレットがカバー内に並んでいて、バーニアを一発噴射ごとに一つを使い切るという仕組みというのも面白いかも」
これらのアイデアのヒントとなったのは、1/100キットに施されたモールド。1/100のディテール表現はムック本の表紙イラストや『13』版の作画などにも影響が散見される要素ということで、これをひとつのモチーフとして今回の内部機構が提案されました。
腕部構造にある程度、目処がついたところで、話題は腕と接続する胸部にまで広がります。接続軸については可動を意識して、近年のアクションモデル等によく見られる引き出し式を想定するのか、もしくは機械としての見た目を意識した形状を新たに考えるのか……といくつか案が出る中、これは立体試作を作ってみて適した形状を一旦探ることになりました。
▲今回のミーティングの中心となった肩パーツと胸部パーツのまとめスケッチ。内部や関節構造、分割線などは立体機構試作の製作に盛り込まれます。
「胸の青い部分はカウリングで、胴体の白い部分は胸の下まで回り込んでるという仕組みにすると、胸部分も多少動かせて可動範囲が広がるかもしれないですね。でも接続方法とか、ちょっと構造を考えるのによりいっそう頭を捻る必要が出てくるかな」
「胸の凹みはダクトなのか、メンテナンスハッチ的なものか、ここは悩みどころですよね」
「いわゆるUSB端子のような、多目的な接続ポートがあって、未使用時にはフタをしている……というのもいいのでは? ここにオプションで作業用アームとかライトなどが付いてもいいですね。そのままスリング・パニアーのジョイントにも活かせるギミックになるのでは?」
胸部構造についても様々なアイデアが出る中で、それらを一旦まとめたスケッチを参考に立体試作を作って、さらなる検証をすることとなりました。
【PLUS!】
可動範囲を広く求めるのに、ボールジョイント的な仕様ではなく1軸可動の組み合わせによって回答を出したNAOKI氏製作の腕部立体機構試作は、様々なインスピレーションをもたらしました。元々はデザイナーである大河原邦男氏が描くところの設定画に準じたゆるやかな前腕の”曲げ”再現を意識しての機構でしたが、劇中で見られるような多様なアングルへの対応も具現化しており、一同試作を手にその動きを試しながら感嘆の声を上げていました。

▲大河原氏の設定画にある、豊かな前腕からヒジの動きを、立体としてどう説得力をもたせていくか。NAOKI氏の立体機構試作をもとに熱い議論が交わされ、その機構は後にアレンジされ、ROBOT魂での商品化の際に反映されています。
肩のディテールは1/100キット等を参考にブラッシュアップという考え方で進められましたが、当時整合性を考える上で頭を悩ませた部分。各種設定資料から参考になるディテールを引っ張ってくるのですが、特に『13』の設定にある内側のバーニアをどう処理するかという点が議論され、オプション的な存在として捉え、後から考えるという案に落ち着きました。
ROBOT魂担当コメント
皆様こんにちは! テンパことオカモトです。
早くも第2回の更新がやって参りました。前回記事を見ながら、実際に商品化された「ROBOT魂 <SIDE RV> バイファム」をいじってみました。
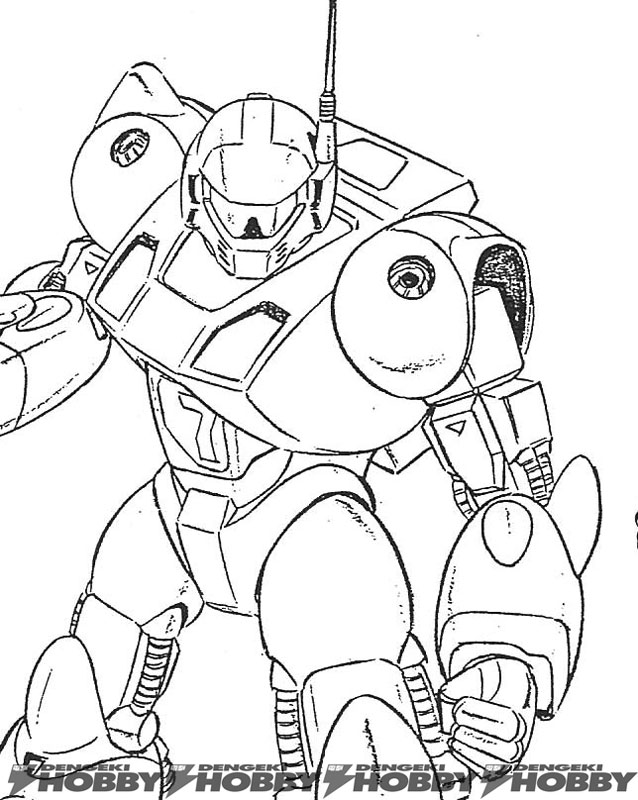
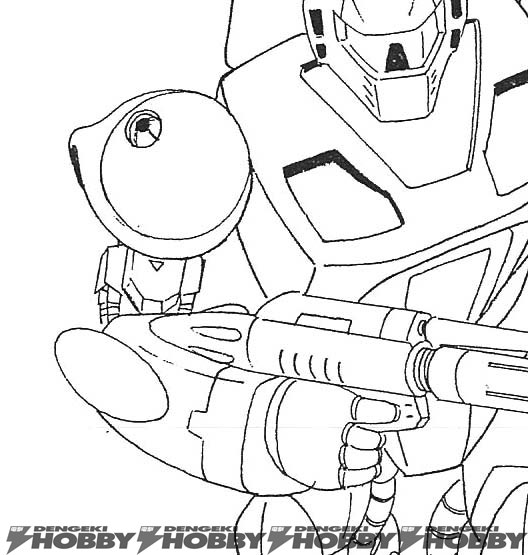
記事の内容通り、「作画上のウソ」を見事に立体造形で再現するヒジ関節構造が確実に反映されていました。銃のフォアグリップを握る左腕が、劇中通りの自然なカーブを描く事が可能になっています。

画像手前のクリアー+赤の腕ブロックは、以前、ワンフェスで行ったロボラボ出張版ステージ用にヒジ関節の構造検証用にサイズを拡大して出力した試作品なんですが、この複雑な関節のおかげで“らしさ”が出せているのだと実感出来ます。


“らしさ”とは、所謂「ガワラ曲げ」と呼ばれる独特のヒジ関節を曲げたポーズですが、これが出来る事で立ち姿がグッと引き締まります。(大河原氏の読みは”オオカワラ”に対し濁点が付きの”ガワラ曲げ”が一般的の様です)
考察から立体化されたバイファム、商品を入手されている皆様は、ぜひ記事と照らし合わせて動きを楽しんでいただければと思います。それではまた次回!!
次回は2015年10月9日(金)更新。引き続き「RVの腕部、胴体の機構及び内部構造についての考察」をお届けします!
<関連情報>
ROBOT魂 <SIDE RV> バイファム(ツインムーバー装備)|魂ウェブ
http://tamashii.jp/item/11116/
電撃ホビーウェブ|【連載】電撃ロボラボ PLUS Vol.1 RVの腕部(おもにヒジ関節など)についての考察
https://hobby.dengeki.com/news/103051/
(c)サンライズ