
続・RVの腕部、胴体の機構及び内部構造についての考察 【連載】電撃ロボラボ PLUS Vol.3

80年代はSFロボット黄金の時代。そんな時代に生まれた数々のリアルロボットたち。電撃ホビーマガジンとサンライズがタッグを組み、大人の感性と現代科学に即したSF考証でリアルロボットを検証し立体化していく……。それが「電撃ロボラボ」です。
※これまでのバックナンバーも併せてご覧ください。
【連載】電撃ロボラボ PLUS Vol.1 RVの腕部(おもにヒジ関節など)についての考察
【連載】電撃ロボラボ PLUS Vol.2 RVの腕部、胴体の機構及び内部構造についての考察

前回は腕部の関節可動からフレーム、推進剤タンク等の内部構造、そこから胸部ならびに胴体構造へと話がおよんだ機構検証。今回はさらに腕部の立体機構試作が進められたところで、それを基により考証を深めていきました。(2013年2月号掲載)
引き出し式と回転軸の組み合わせで、肩軸部分は広い可動範囲を確保しています。見た目もブロック状にして、棒状の軸だと目立つ隙間の軽減や見た目の自然な感じを意識して仕上げています。

▲腕部に続いて製作された機構試作は肩と胴体を繋ぐ関節軸。腕部全体と胴体との位置関係は画像のような感じになる。
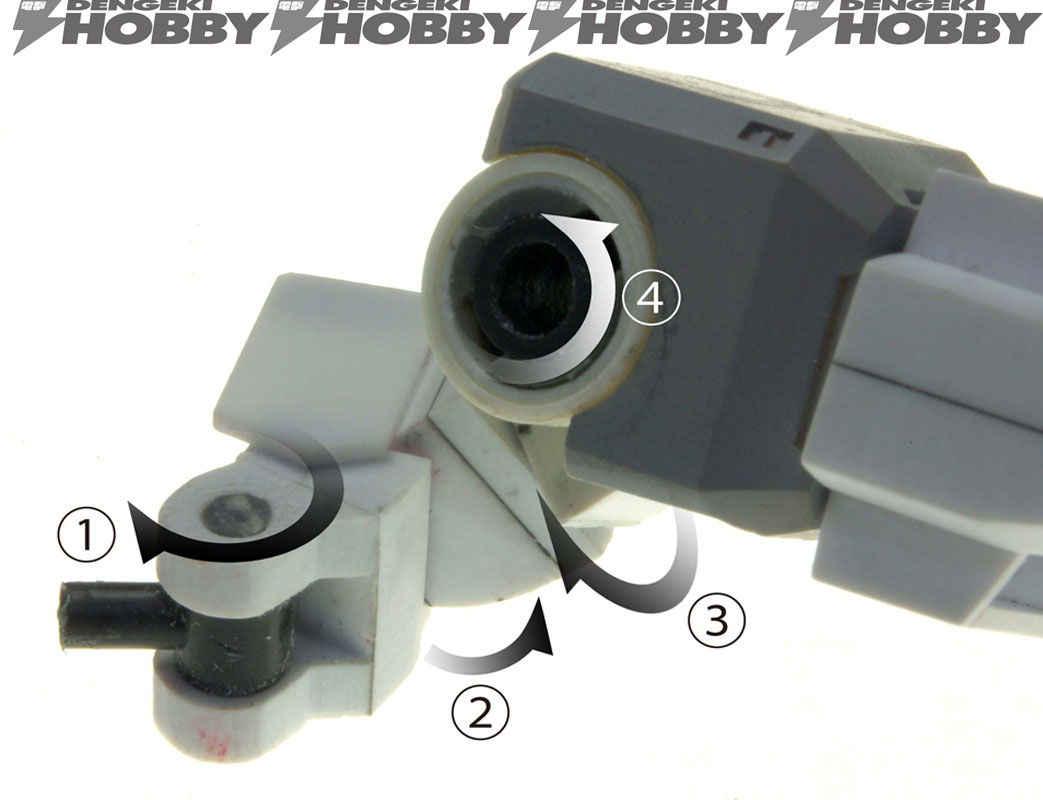
▲肩関節各可動方向解説(※画像番号参照)
1:胴体側の前方引き出し軸/2:胴体側の上方引き出し軸/3:前後方向の回転軸/4:腕側の上下方向回転軸。4軸もの可動軸が存在する複雑な肩関節だが、むやみに可動軸を増やすのではなく、それぞれが目的を持って任意の方向へ可動するために配置されているのが確認できる。
今回の立体機構試作は胴体(胸部)と腕を繋ぐ肩軸付近の関節構造。NAOKI氏が製作した試作はヒジと同様に一軸式の組み合わせによる多重ジョイントで、あらぬ方向にぶれることなく、大きく動かしたいと考える向きにしっかりと動く仕組みとなっています。

▲劇中ではあまりお目にかかることはないが”殴り掛かる”ポーズもこのように自然な流れで再現する事ができる。RVが人型の船外活動用機体という側面がある以上、腕部は特にその性質上、人体の動きを可能なかぎり再現する必要があるであろう。という考証の元、他の部位よりも複雑な関節を製作することとなった。
「引き出し式構造と、回転軸を組み合わせた肩関節は前回のヒジ関節と併せて、より捻りの入った動きが可能。大河原氏のイラスト等に見られる正面撃ちポーズなんかも無理なくできます」

▲上記の考証を経て、多重関節の組み合わせにより作られた肩とヒジの機構が、バイファムのお約束のポーズである”銃の両手持ち”が「ひねりの加わった自然な構え」を再現可能とした。

▲肩軸を前方に引き出した状態。ブロックごと引き出される構造なので、目立つ隙間が生じるなどの違和感はない作りだ。
腕の関節構造については完璧と言える回答が出ました。前回の話題に上った細部のディテールについては今後の掲載内容で触れていきます。